Crossvault
Summary
First, we construct the assembly from a list of meshes representing the blocks.
The JSON file containing the meshes is available here: crossvault.json.
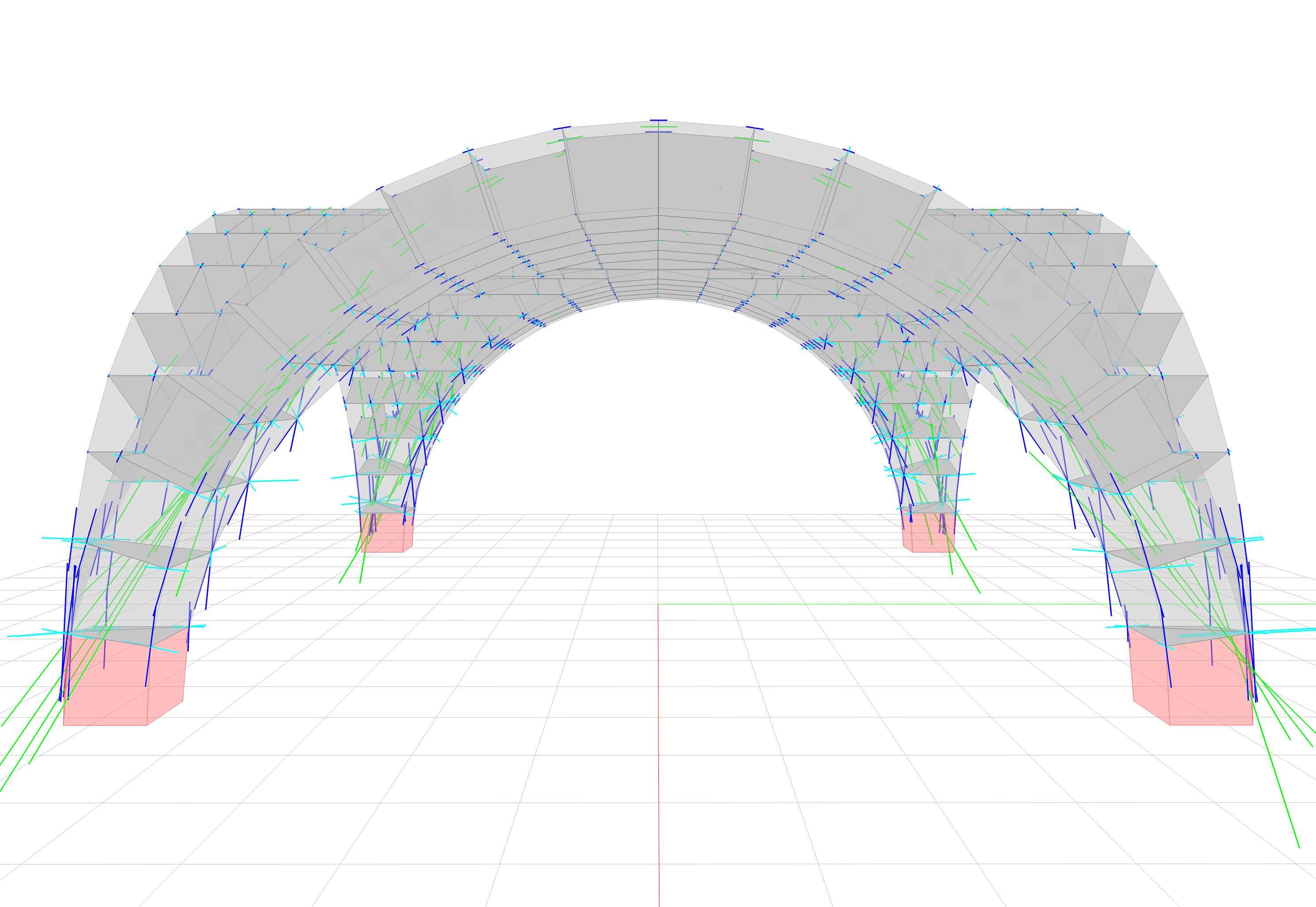
Then, we detect the interfaces between the blocks, and compute an approximate equilibrium solution.
Finally, we export the assembly and visualize the result.
Equilibrium
Coming…
Note
Note that this example uses compas_cra for the equilibrium calculations.
If you don’t have compas_cra installed,
or simply don’t want to compute the contact forces,
just comment out lines 3, 4 and 58.
Code
import pathlib
# from compas_cra.equilibrium import cra_solve
from compas_cra.equilibrium import rbe_solve
import compas
from compas.datastructures import Mesh
from compas.geometry import Scale
from compas_assembly.algorithms import assembly_interfaces
from compas_assembly.datastructures import Assembly
from compas_assembly.viewer import DEMViewer
MESHES = pathlib.Path(__file__).parent / "crossvault_blocks.json"
ASSEMBLY = pathlib.Path(__file__).parent / "crossvault_assembly.json"
# =============================================================================
# Block meshes
# =============================================================================
meshes: list[Mesh] = compas.json_load(MESHES)
for mesh in meshes:
mesh.transform(Scale.from_factors([0.03, 0.03, 0.03]))
# =============================================================================
# Assembly
# =============================================================================
assembly = Assembly()
for mesh in meshes:
assembly.add_block_from_mesh(mesh)
# =============================================================================
# Interfaces
# =============================================================================
assembly_interfaces(assembly, nmax=7, tmax=1e-3, amin=1e-2)
# =============================================================================
# Boundary conditions
# =============================================================================
assembly.unset_boundary_conditions()
nodes = sorted(assembly.nodes(), key=lambda node: assembly.node_point(node).z)[:4]
for node in nodes:
assembly.set_boundary_condition(node)
# =============================================================================
# Equilibrium
# =============================================================================
# CRA is too slow for this structure.
# RBE gives only an approximative result.
# Ideally, the RBE result can be used to jumpstart the CRA solver
# But this is not available yet...
rbe_solve(assembly)
# =============================================================================
# Export
# =============================================================================
compas.json_dump(assembly, ASSEMBLY)
# =============================================================================
# Viz
# =============================================================================
viewer = DEMViewer()
viewer.view.camera.position = [0, -15, 3]
viewer.view.camera.look_at([0, 0, 2])
viewer.add_assembly(assembly)
viewer.run()