A Semicircular Arch
Summary
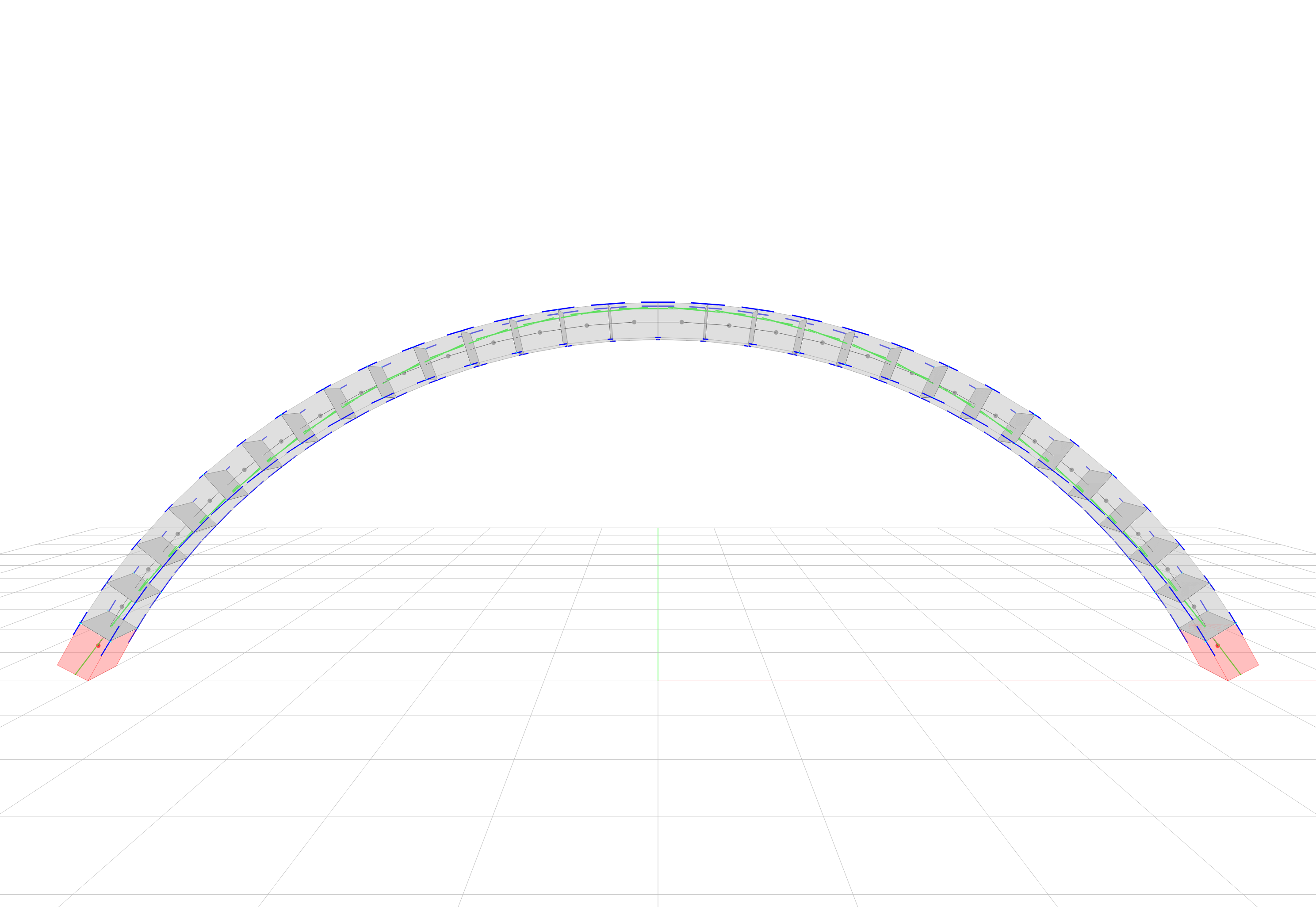
First, we construct an assembly from a template for semicircular arches. Then, we identify the interfaces of the assembly, and compute the contact forces between the blocks that result in static equilibrium of the assembly with gravitational loads. Finally, we export the assembly to a JSON file and visualize the result with the DEM Viewer.
Equilibrium
Coming…
Note
Note that this example uses compas_cra for the equilibrium calculations.
If you don’t have compas_cra installed,
or simply don’t want to compute the contact forces,
just comment out lines 3 and 41.
Code
import pathlib
from compas_cra.equilibrium import cra_penalty_solve
import compas
from compas_assembly.algorithms import assembly_interfaces
from compas_assembly.datastructures import Assembly
from compas_assembly.geometry import Arch
from compas_assembly.viewer import DEMViewer
ASSEMBLY = pathlib.Path(__file__).parent / "arch_assembly.json"
# =============================================================================
# Arch assembly
# =============================================================================
arch = Arch(rise=3, span=10, thickness=0.3, depth=0.5, n=30)
assembly = Assembly.from_template(arch)
# =============================================================================
# Interfaces
# =============================================================================
assembly_interfaces(assembly, nmax=7, tmax=1e-3, amin=1e-2)
# =============================================================================
# Boundary conditions
# =============================================================================
assembly.unset_boundary_conditions()
nodes = sorted(assembly.nodes(), key=lambda node: assembly.node_point(node)[2])[:2]
for node in nodes:
assembly.set_boundary_condition(node)
# =============================================================================
# Equilibrium
# =============================================================================
cra_penalty_solve(assembly)
# =============================================================================
# Export
# =============================================================================
compas.json_dump(assembly, ASSEMBLY)
# =============================================================================
# Viz
# =============================================================================
viewer = DEMViewer()
viewer.view.camera.position = [0, -15, 3]
viewer.view.camera.look_at([0, 0, 2])
viewer.add_assembly(assembly)
viewer.run()