Line-Mesh intersections using a BVH with AABB volumes
this example computes the intersections between a list of rays/lines and a mesh, using a Bounding Volume Hierarchy (BVH) with axis-aligned bounding boxes (AABBs) as bounding volumes for the tree nodes. AABBs typically provide a better fit of the geometry of the mesh and its primitives than oriented bounding boxes. However, they are (slightly) more expensive to compute.
Load a quad mesh from an OBJ file.
Convert the quads of the mesh to triangles for accurate intersections.
Build a BVH with AABB nodes.
Construct a list of intersection lines.
Traverse the tree to find the intersection of each line, if one exist.
Keep track of the boxes of the leaf nodes of the tree for visualisation.
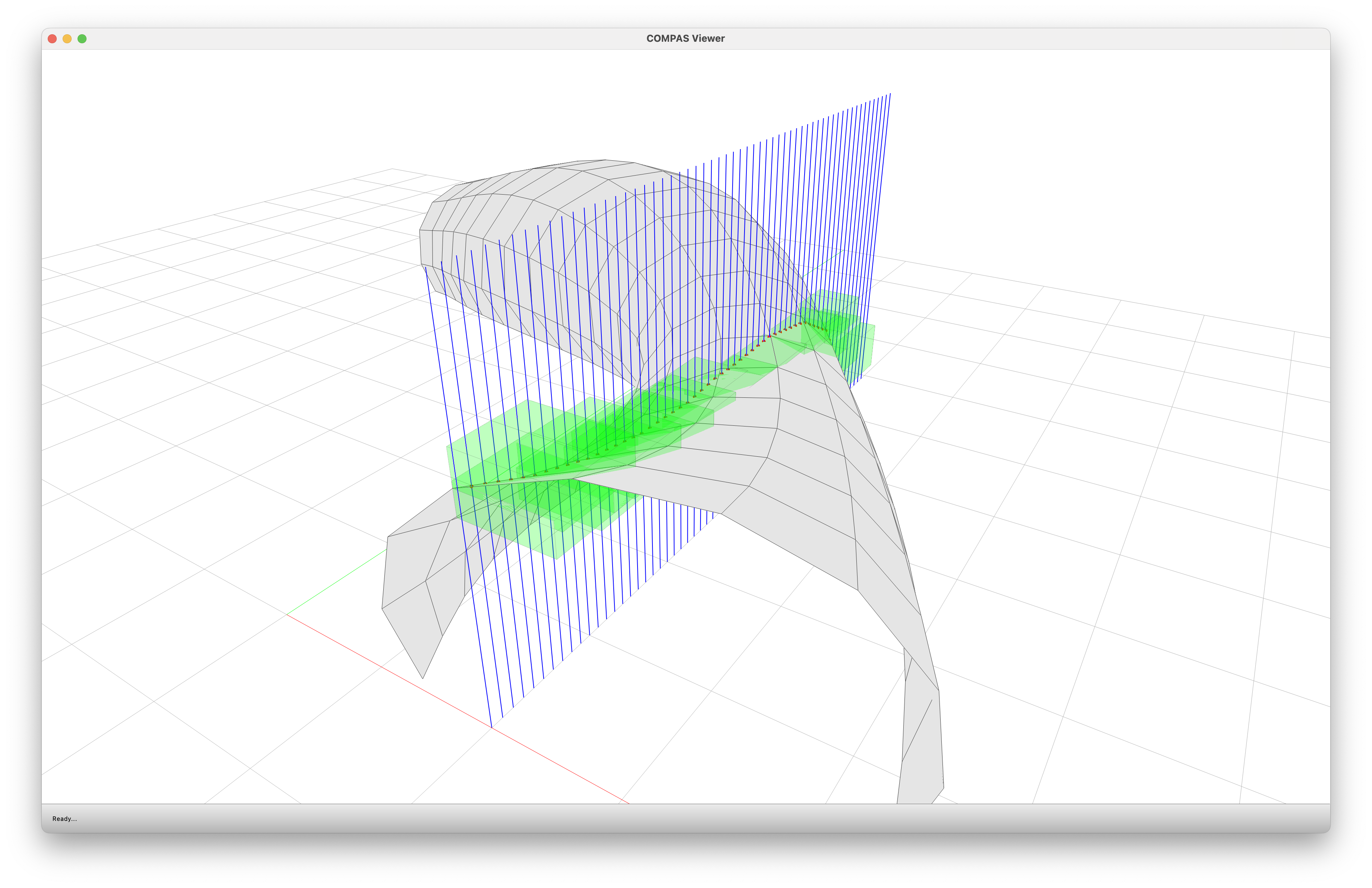
Visualize the mesh, the lines, the boxes, and the intersections.
import compas
from compas.colors import Color
from compas.datastructures import Mesh
from compas.geometry import Line
from compas.geometry import Point
from compas_model.datastructures import BVH
from compas_model.datastructures import AABBNode
from compas_model.geometry import intersection_ray_triangle
from compas_viewer import Viewer
from compas_viewer.config import Config
mesh = Mesh.from_obj(compas.get("tubemesh.obj"))
# =============================================================================
# Build BVH
# =============================================================================
trimesh: Mesh = mesh.copy()
trimesh.quads_to_triangles()
tree = BVH.from_mesh(trimesh, nodetype=AABBNode)
# =============================================================================
# Intersections
# =============================================================================
lines = [Line.from_point_and_vector([2, i * 0.1, 0], [0, 0, 3]) for i in range(60)]
boxes = []
points = []
for line in lines:
for node in tree.intersect_line(line):
if node.is_leaf:
triangle = node.objects[0][2]
result = intersection_ray_triangle(line, triangle)
if result:
boxes.append(node.box)
points.append(Point(*result))
# =============================================================================
# Viz
# =============================================================================
config = Config()
config.camera.target = [2.3, 1.8, 1.4]
config.camera.position = [5.2, -2.8, 4.4]
viewer = Viewer(config=config)
viewer.scene.add(mesh)
viewer.scene.add(lines, linecolor=Color.blue(), linewidth=2)
viewer.scene.add(boxes, facecolor=Color.green(), opacity=0.25)
viewer.scene.add(points, pointcolor=Color.red(), pointsize=10)
viewer.show()