Wedge
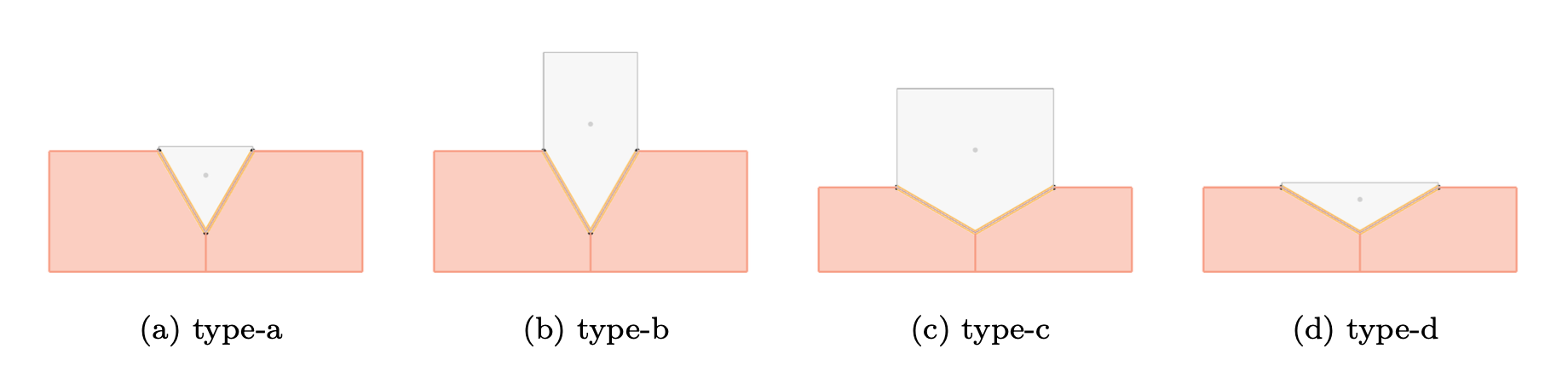
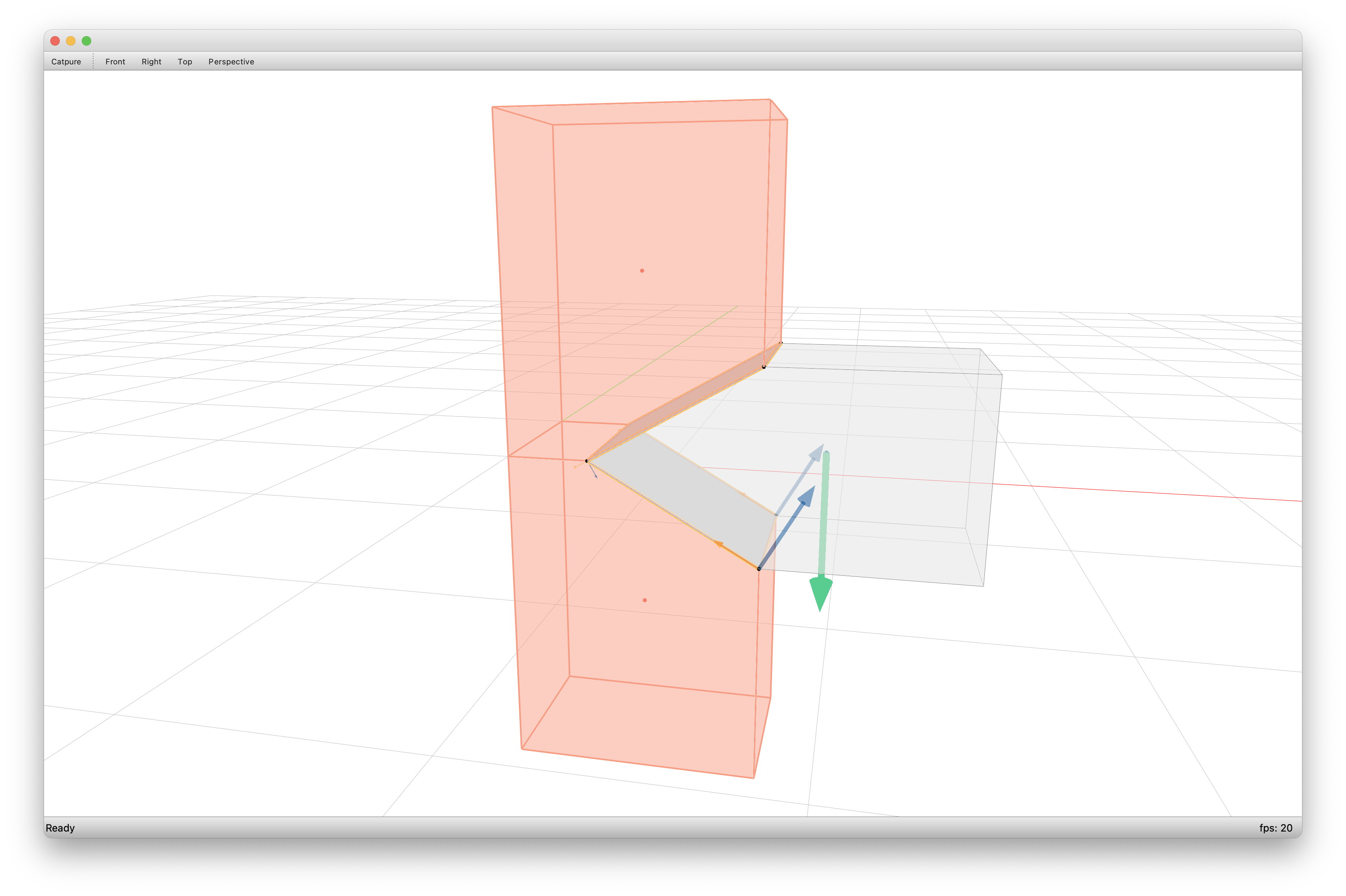
Type-b
This example rotate type-b geometry 90 degree respect to Y-axis
"""Example to simulate wedge example type-a, type-b, type-c, type-d"""
import math as mt
import os
import compas
import compas_cra
from compas_cra.algorithms import assembly_interfaces_numpy
from compas_cra.datastructures import CRA_Assembly
from compas_cra.equilibrium import cra_solve
from compas_cra.viewers import cra_view
mu = 0.84 # friction coefficient
deg = 90 # rotation in degree
axis = "y-axis" # y-axis, x-axis, xy30-axis
FILE_I = os.path.join(compas_cra.SAMPLE, "type-b.json")
rotate_axis = [0, 1, 0]
if axis == "y-axis":
rotate_axis = [0, 1, 0] # around y-axis
if axis == "x-axis":
rotate_axis = [1, 0, 0] # around x-axis
if axis == "xy30-axis":
rotate_axis = [mt.sqrt(3), 1, 0] # rotate around xy30-axis
assembly = compas.json_load(FILE_I)
assembly: CRA_Assembly = assembly.copy(cls=CRA_Assembly)
assembly.set_boundary_conditions([0, 1])
assembly_interfaces_numpy(assembly, nmax=10, amin=1e-2, tmax=1e-2)
assembly.rotate_assembly([0, 0, 0], rotate_axis, deg)
cra_solve(assembly, verbose=True, timer=True, d_bnd=1e-2)
cra_view(
assembly,
resultant=False,
nodal=True,
grid=True,
displacements=False,
dispscale=0,
scale=0.5,
)